Hi, I'm Enrico Battistini
Automation Engineer

Automation Engineer
I am 24 years old and currently enrolled in the second year of the International Master's Degree in Automation Engineering at the University of Bologna.
I am fascinated by Robotics, Computer Vision and AI. I have a passion for combining theoretical knowledge with practical applications. In my free time, I enjoy playing beach volleyball and watching movies.
University of Bologna
The main areas of interest are Robotics, Autonomous Systems, Mechatronics and Automatic Machines, based on a background in Mechanics, Control Systems Theory, Real-time Software and AI.
University of Bologna
Thesis: Modeling and Control of an Electromagnetic Vibrating Conveyor.
Final grade: 101/110
Eurecat, Barcelona, Spain
Summer Jobs
Centro Ricerche Marine di Cesenatico
Simulation of TurtleBot3 in a house environment - Detection (with a CNN), Localization (SLAM) and Following of a person.
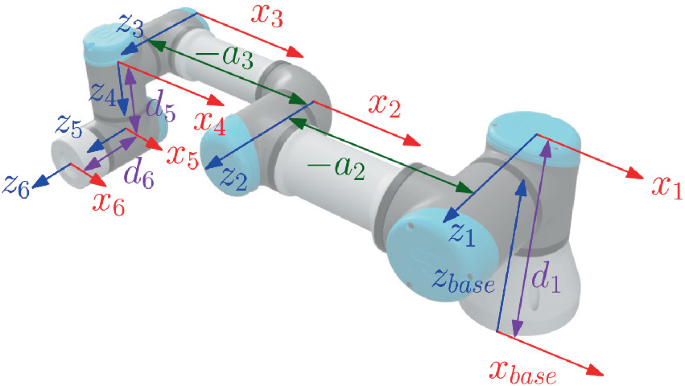
Modelling and simulation of a UR5 robotic manipulator with PD + Gravity compensation control. The dynamic model and control strategy are tested through simulation of a pick-and-place trajectory in joint space.
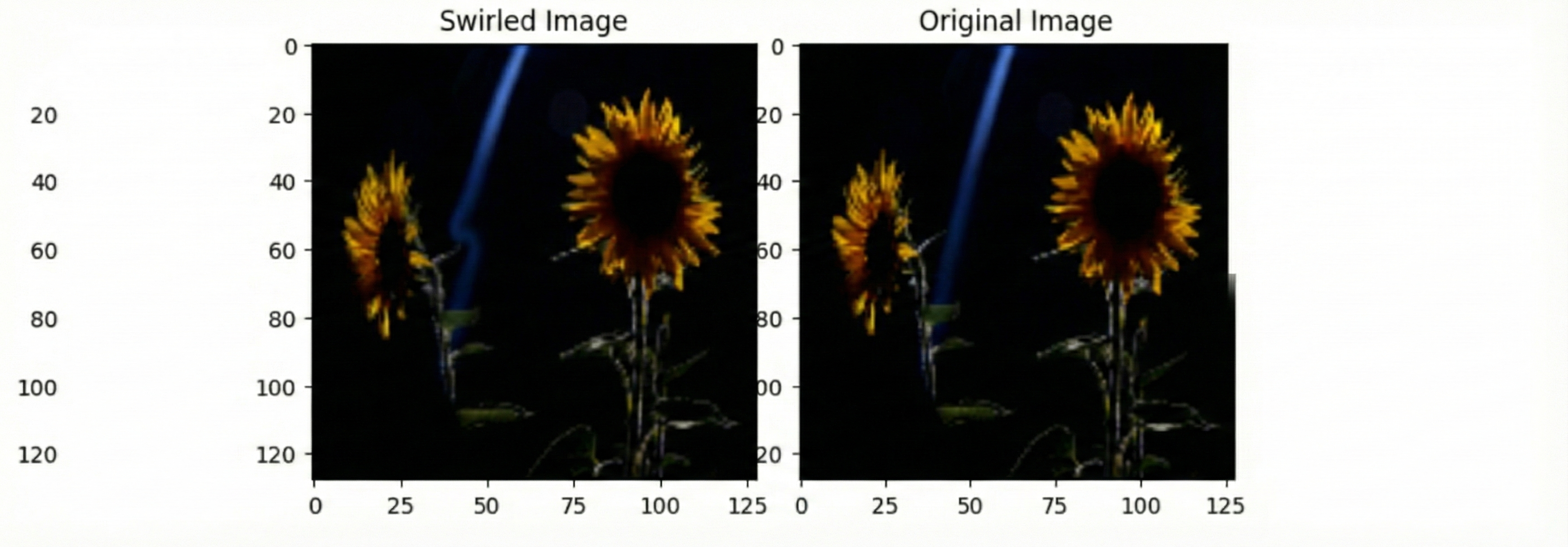
The goal of this project is to identify and correct moderate swirl artifacts in natural images. The U-Net architecture is employed for this task.
Localization, Mapping, Navigation, Detection and pick-and-place of ArUco cubes using the TIAGo robot.
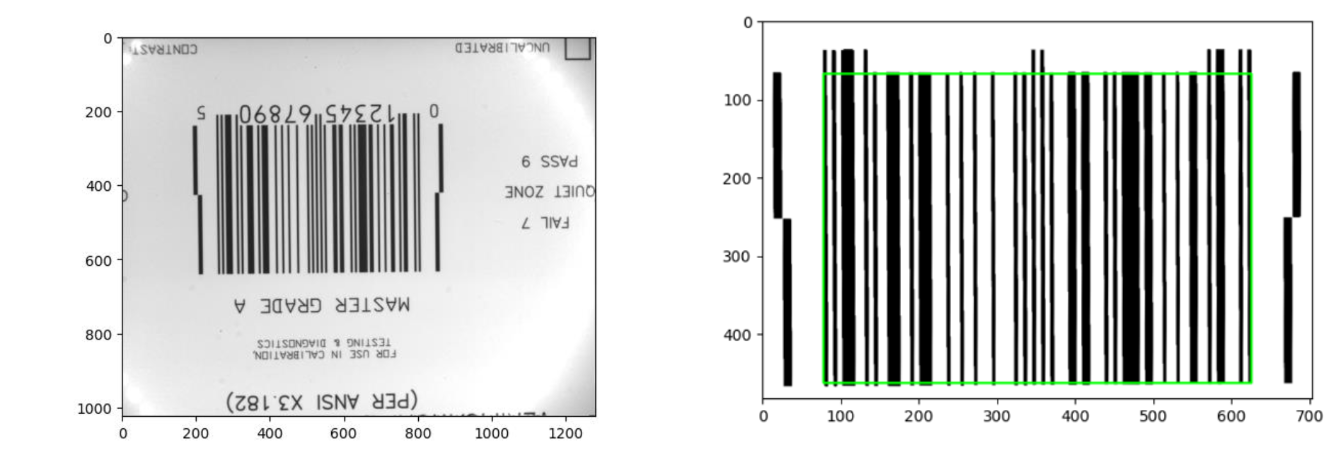
This project implements an algorithm to identify the barcodes and compute various quality parameters. In this projcet are used classical Computer Vision techniques, like Binarization, Filtering, Morphological operations, Contours, PCA, etc.
This project implements the control logic and a web HMI for a Multi-box Palletizer in a simulation environment.

The goal of this project is to design an optimal control strategy for an actuated flexible surface, which models the behavior of adaptive wing structures in aircraft or unmanned aerial vehicles (UAVs).
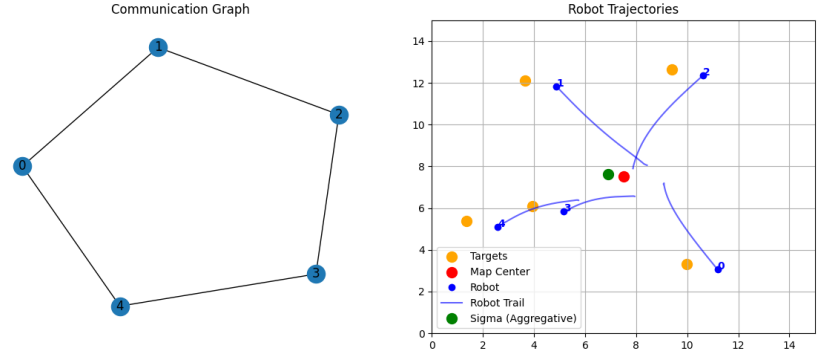
Impementation of a Cooperative Multi-robot Target Localization through Distributed Consensus Optimization (Task 1) and an Aggregative Optimization for Multi-Robot Systems (Task 2).